The Problem
Autonomous rendezvous and docking in LEO is one of the hardest problems in spacecraft GNC. Signal delay from ground makes real-time human control impossible during proximity operations, the system must sense, decide and act entirely on its own, within strict approach corridor constraints, using only onboard sensing. A failure at any layer cascades into mission loss.
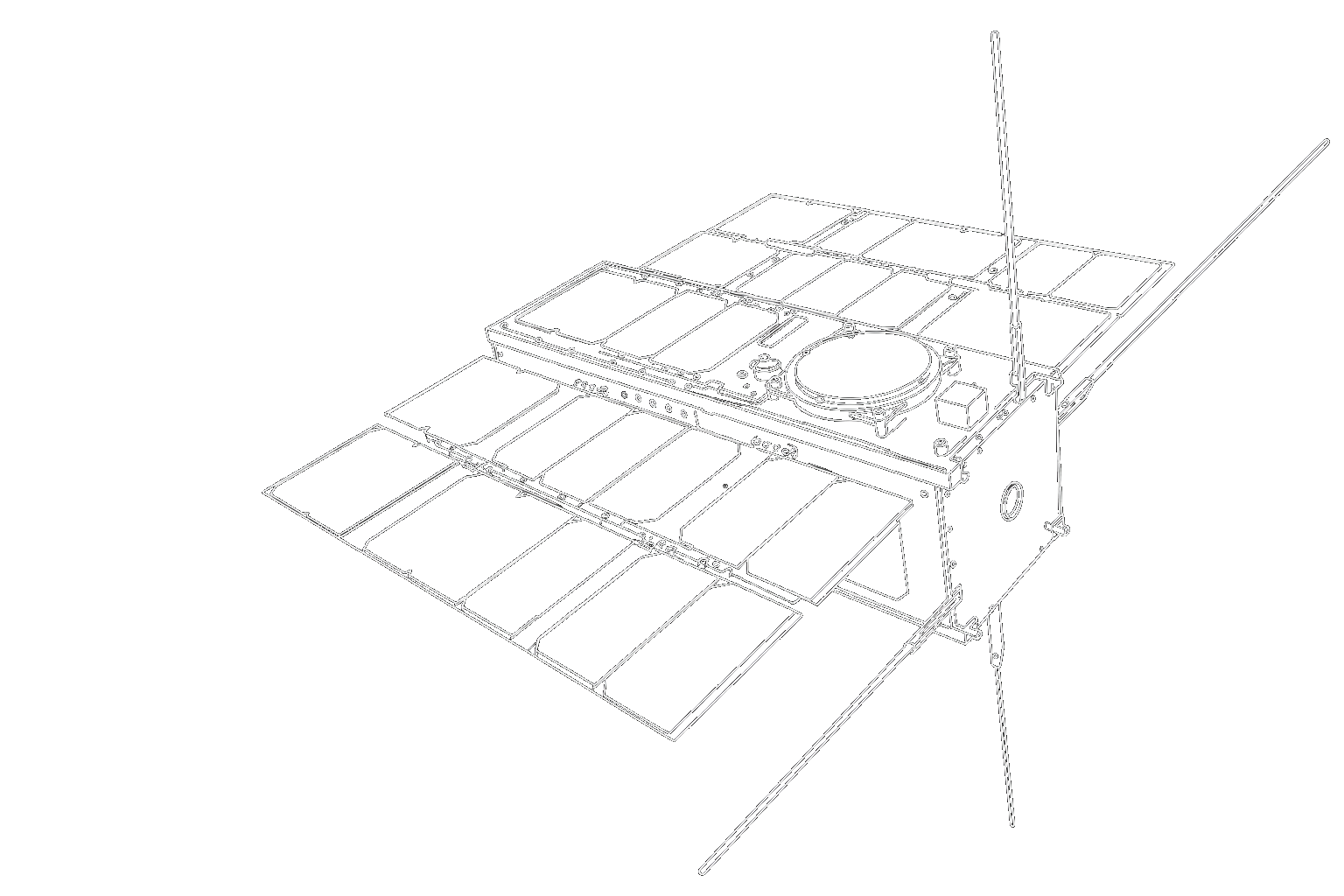
I autonomously designed, implemented and validated the full GNC subsystem for a 6U CubeSat to perform fully autonomous RVD with a target 6U CubeSat in LEO. Working in a small startup team meant wearing many hats beyond pure GNC, hardware integration, testbed setup, simulation infrastructure, which forced a much broader understanding of the system than a single-discipline role would have allowed.
What I Built
01 · Relative motion modelling — HCW dynamics in the Hill frame
Built a 6-DOF relative navigation model in the Hill frame (H/V/R-bar axes) using Clohessy-Wiltshire equations, validated under ideal and J2-perturbed orbital conditions. MPC handles translational control via receding-horizon optimisation over thrust inputs; APF enforces approach corridor and keep-out zone constraints. Reference frame: LVLH. Attitude: quaternion-based nadir-pointing hold.
02 · Actuator Fidelity — µVAT PWM Firing Logic
The µVAT cold-gas thrusters operate discretely, on or off, but the MPC assumes continuous thrust. Replacing the continuous model with a discrete PWM firing algorithm matched to actual thruster behaviour was the single highest-impact fidelity change in the entire GNC stack. Without it, the simulation was physically meaningless.
03 · Vision-Based Navigation Pipeline
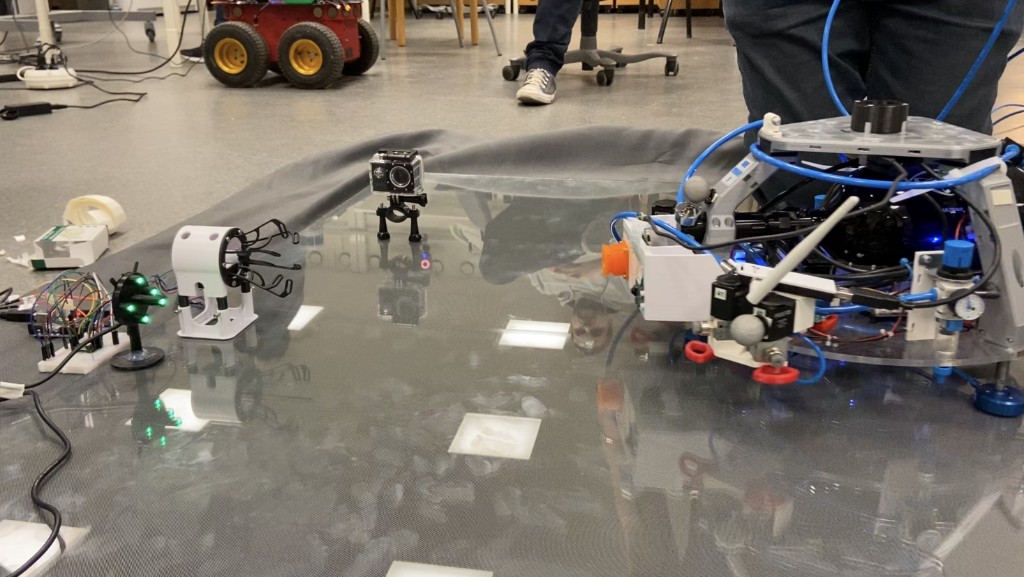
Engineered a full VBN pipeline: object detection → blob analysis → LED feature extraction → relative pose estimation. Physically validated on a 2×2×1 m aluminium grid using a Raspberry Pi camera and a 3D-printed docking target, providing hardware-level ground truth for the navigation filter before co-simulation integration.
04 · Hardware Validation & End-to-End Co-Simulation
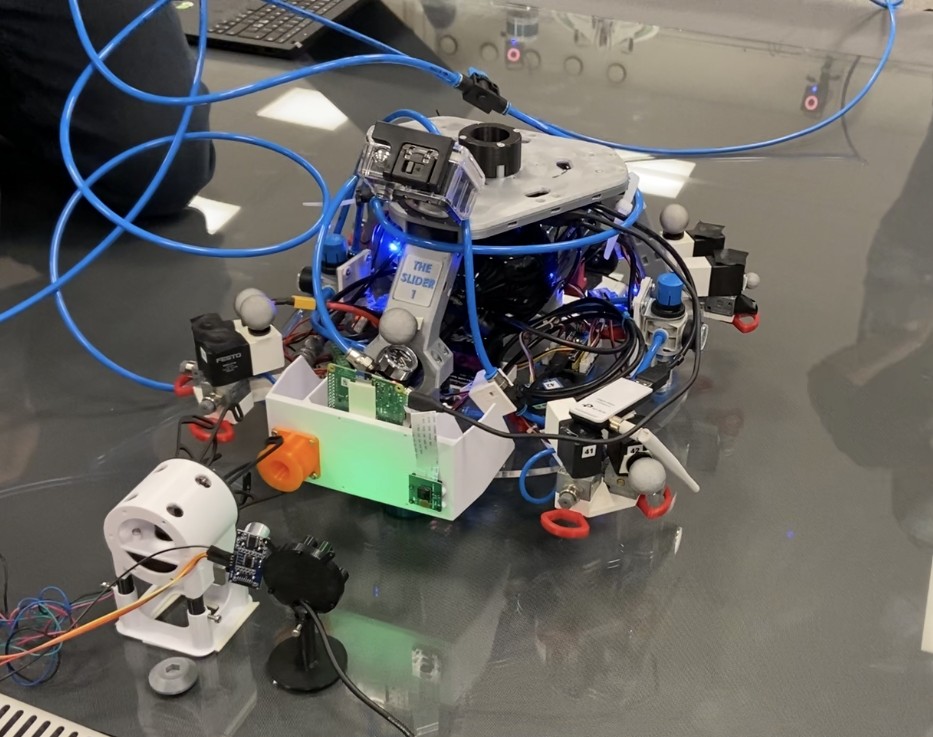
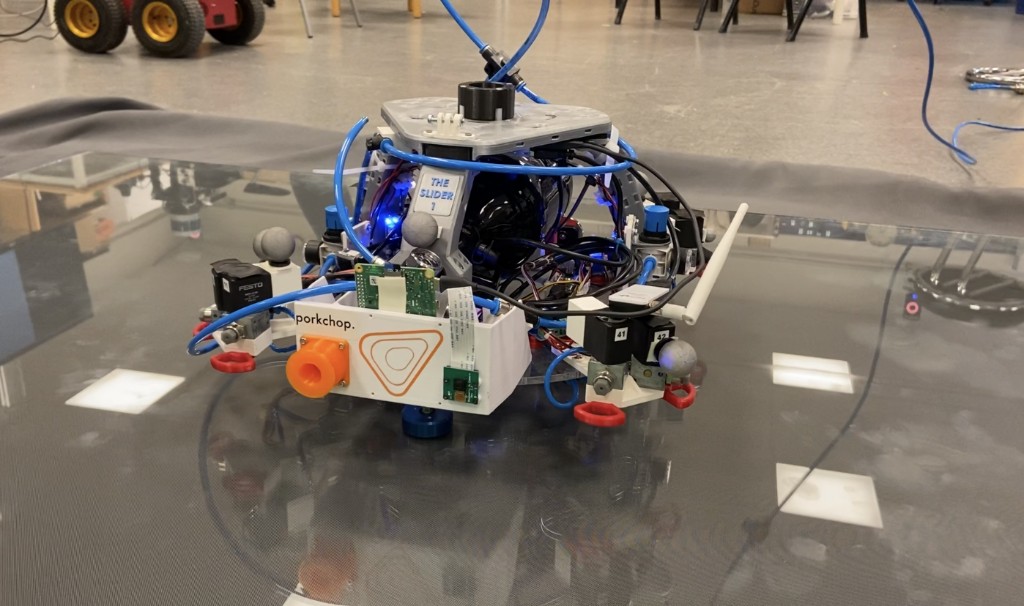
Docking port mechanics validated at LTU Luleå University of Technology on a 2-DOF planar air-bearing slider simulating microgravity conditions. Testing validated docking port alignment and controller performance in 2 degrees of freedom, with the VBN LED target frame and Raspberry Pi camera active on the mothership during the docking approach. Full approach and docking sequence then run in closed-loop co-simulation: Unreal Engine 4.26 (visual scene, VBN sensor input) + MATLAB/Simulink (GNC plant model) operating in real time. Evaluated docking precision, corridor adherence and VBN reliability across the full manoeuvre.
Key Decision
MPC over LQR for proximity operations. APF over a geometric corridor law. LQR is simpler and computationally lighter, but it has no constraint-handling capability. Proximity operations impose hard keep-out zones and approach corridor constraints that LQR cannot enforce natively; MPC folds these in as inequality constraints at every control step. The tradeoff was real-time compute: an interior-point QP solver on a 10-state system on embedded hardware, where LQR would have been a single matrix multiply.
APF was chosen over a pure geometric guidance law because approach geometry must adapt to the current relative state, not be fixed at design time. A geometric law is rigid; APF is reactive. The cost was the local-minima failure mode, which became The Hardest Problem.
The Hardest Problem
The VBN pipeline relied on LED feature extraction, robust under controlled laboratory lighting but fragile under high-contrast orbital illumination conditions where specular reflections and shadow transitions cause feature dropout. Standard thresholding approaches failed to generalise across lighting angles without manual retuning for each scenario.
The fix was a multi-stage blob validation pipeline with adaptive contrast normalisation before feature extraction, combined with a confidence-weighted pose estimate that down-weights detections below a feature-quality threshold rather than failing hard. This made the pipeline degrade gracefully rather than catastrophically, critical for a safety-of-approach system.
Outcomes
6-DOF
Full closed-loop RVD sequence, position and attitude in LVLH frame, co-simulation validated
Dual-layer
MPC translational control + APF corridor enforcement, validated across all approach phases
Hardware VBN
Vision-based pose estimation physically validated on testbed, not just simulated
HW-in-loop
Docking mechanics and VBN validated on 2-DOF air-bearing slider at LTU Luleå University
What I'd Do Differently
The VBN pipeline would benefit from a learned keypoint detector trained on synthetic orbital imagery rather than hand-tuned LED blob extraction, far more robust across lighting conditions without per-scenario retuning. I would also move earlier toward hardware-in-the-loop testing of the full GNC stack before co-simulation, to surface actuator edge cases sooner.
Skills Gained
Transferable beyond the space domain
Model Predictive Control with hard state and input constraints
Artificial Potential Field guidance: reactive, constraint-aware path planning
6-DOF dynamics modelling and linearisation around equilibrium
Computer vision pipeline: detection, feature extraction, pose estimation
Hardware-in-the-loop validation methodology
Real-time co-simulation across two environments (Unreal + Simulink)
Embedded computing on resource-constrained hardware (Raspberry Pi)
Designing control systems that degrade gracefully, not catastrophically