Most engineers pick a domain and stay in it. Over the past 4+ years I have deliberately crossed between them, from UAV autonomy and CubeSat GNC to IoT integration for distributed energy systems. My mission is to combine cross-domain expertise across automation, autonomy and real-world systems to research, build and deploy technologies that move from complex engineering concepts to reliable, independent real-world operation.
I've applied this mindset across different domains, from UAVs and CubeSats to distributed energy systems. In each case, the challenge started with demanding requirements, limited existing infrastructure and real-world constraints. My work has focused on transforming those constraints into systems that can operate reliably with less need for human intervention.
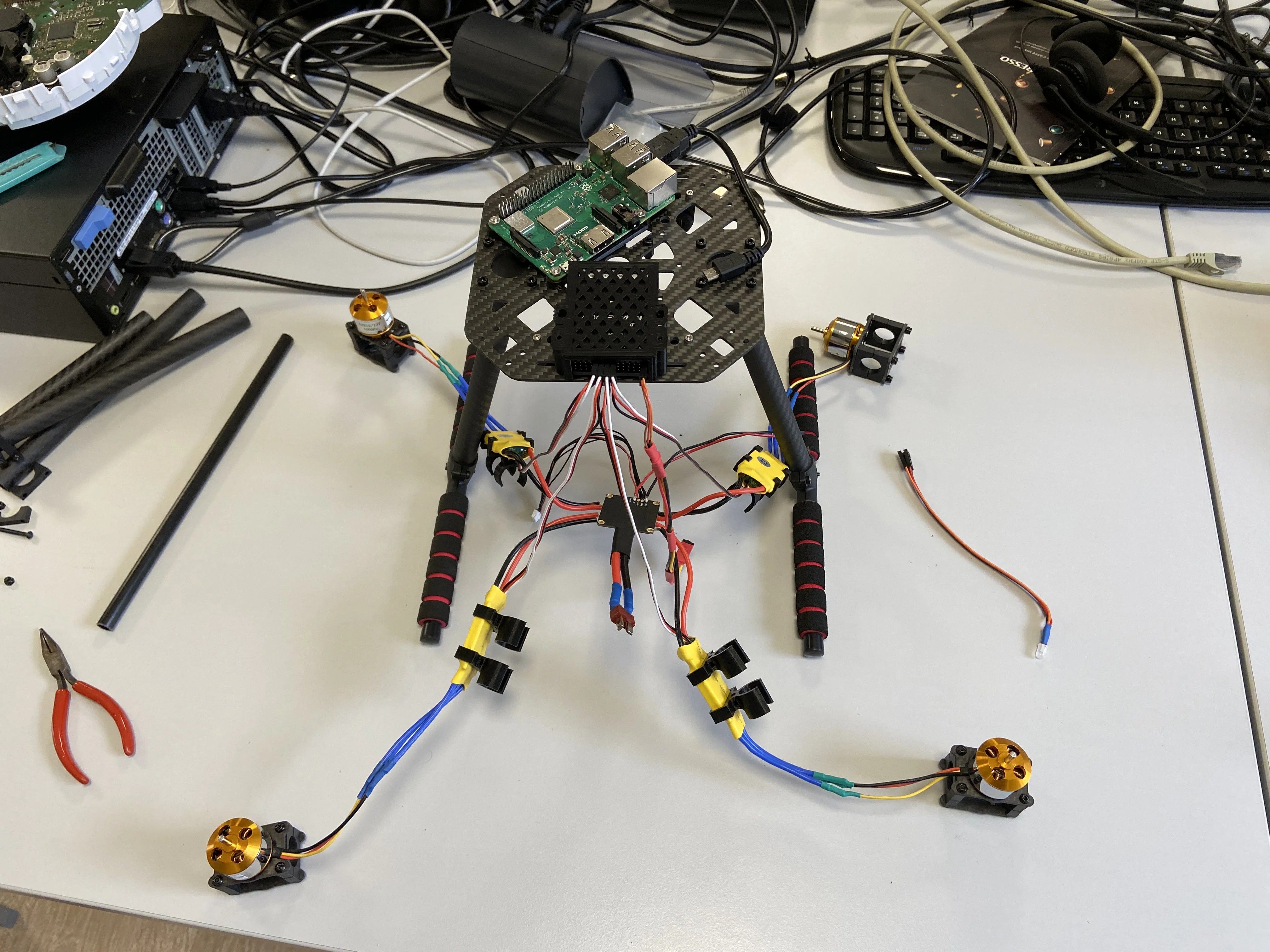
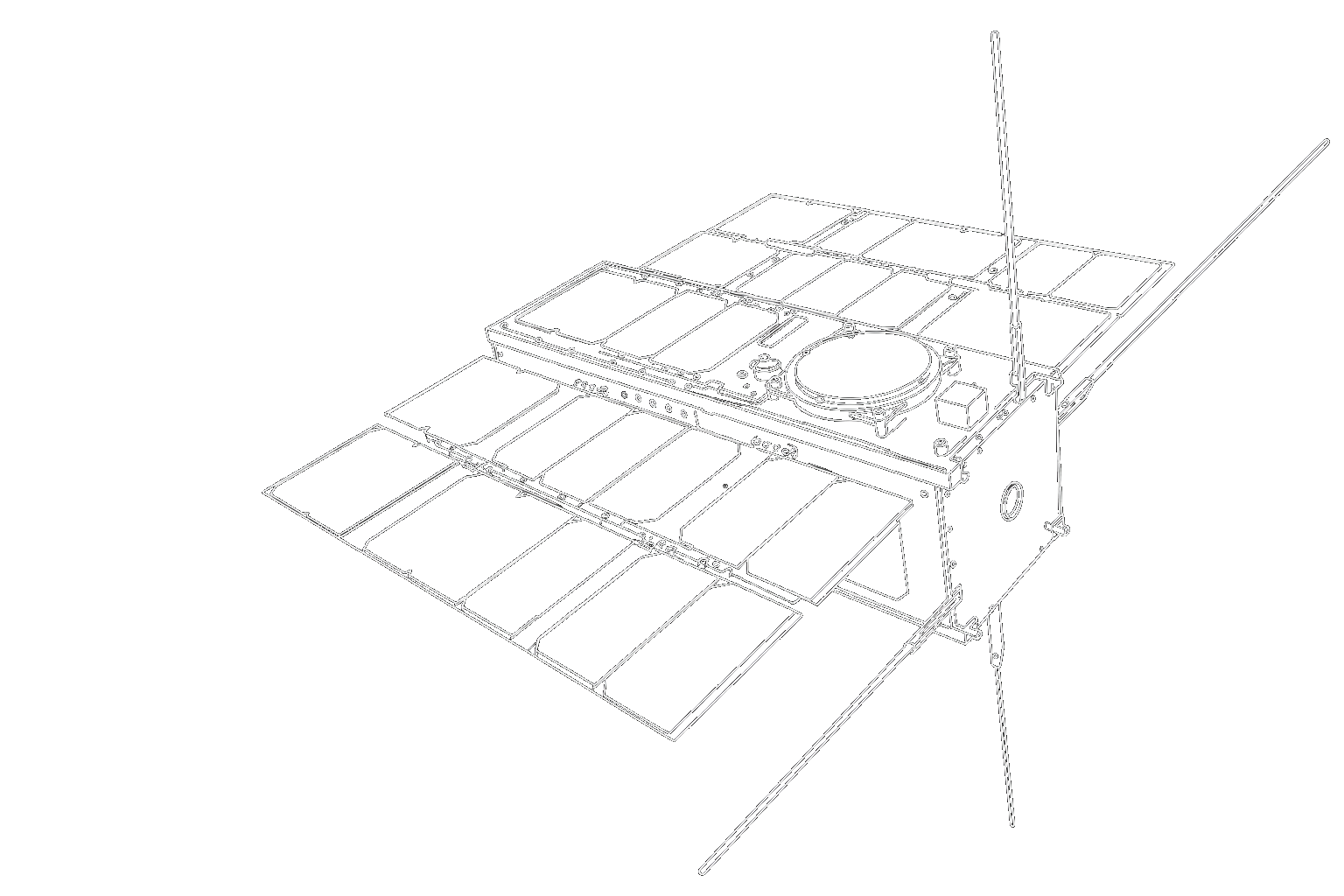
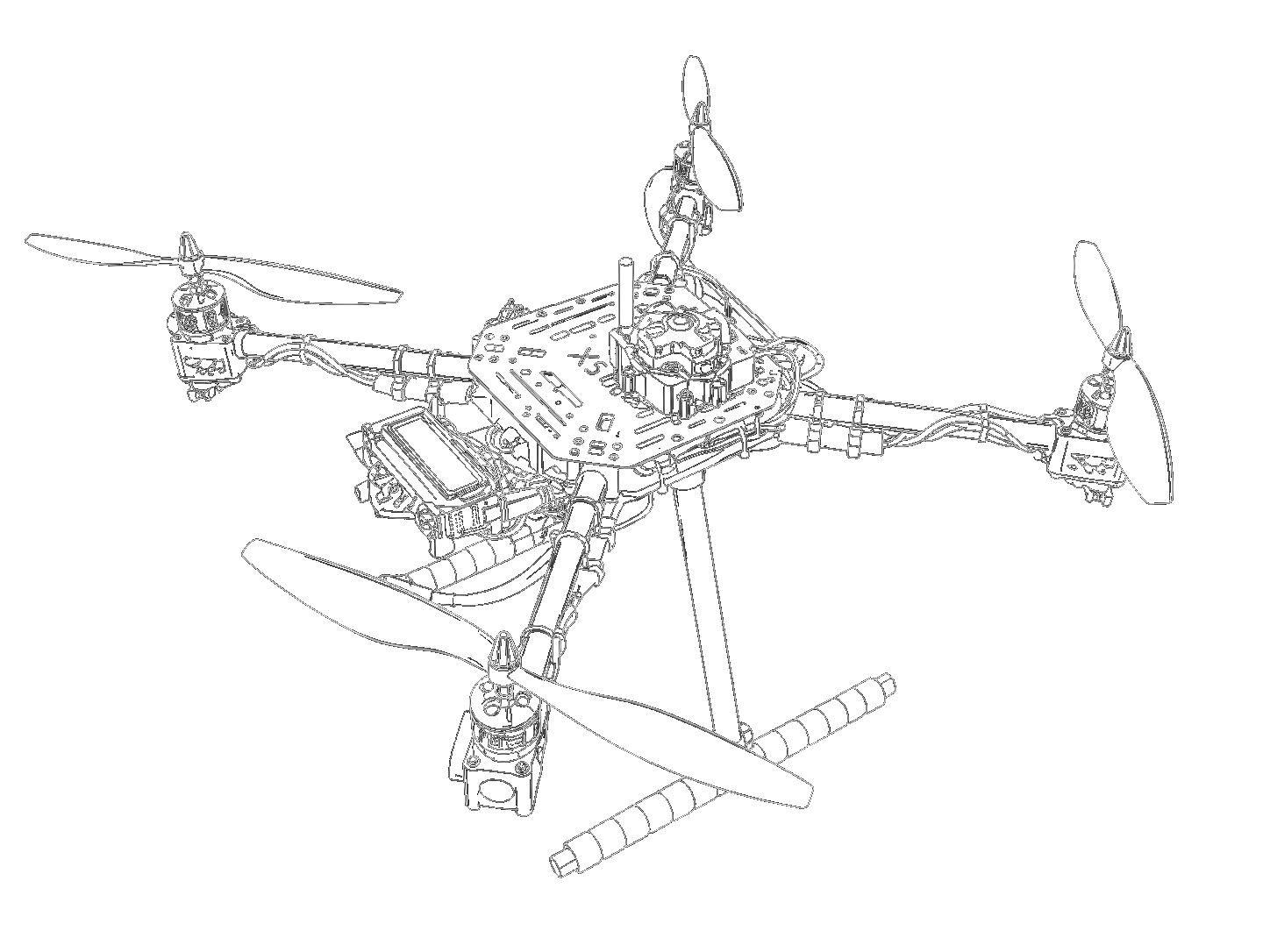
My foundation is in Aerospace Engineering, with a specialization in Guidance, Navigation and Control (GNC). I have worked across different dynamics, vehicles and physical constraints: quadrotor UAVs, 3U and 6U CubeSats, trajectory analysis, path tracking, rendezvous and docking, and GPS-denied navigation. This work has included control law design (PID, LQR, MPC) combined with APF guidance, as well as simulation, software-in-the-loop and hardware-in-the-loop validation, physical testing and real-world integration.
In the energy domain, I have applied the same engineering approach to distributed energy systems: integrating battery and inverter assets, working with MODBUS/IEC104 communication, AWS IoT automation, energy-management logic, and FCR/mFFR prequalification for grid-support markets.
I enjoy challenging environments where the path is not fully defined, resources are limited, and adapting quickly is part of the work. I like taking on problems that force me to learn fast, stay methodical, and keep improving the solution until it works in reality.
GNC · PID · LQR · MPC
VBN / EKF
CubeSat RVD
Distributed Energy
Python · C++ · Go
ROS 2 · ArduPilot · PX4
AWS IoT · Lambda
MODBUS · IEC 104
MATLAB · Simulink · CasADi